Publications
VISAPP 2014 - Full paper
Absolute Spatial Context-Aware Visual Feature Descriptors for Outdoor Handheld Camera Localization
Kurz, D., Meier, P., Plopski, A., and Klinker G.
In Proc. International Conference on Computer Vision Theory and Applications (VISAPP), pp. 56-67, Lisbon, Portugal, 2014.
Abstract
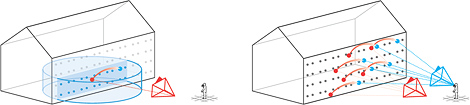
We present a framework that enables 6DoF camera localization in outdoor environments by providing visual feature descriptors with an Absolute Spatial Context (ASPAC). These descriptors combine visual information from the image patch around a feature with spatial information, based on a model of the environment and the readings of sensors attached to the camera, such as GPS, accelerometers, and a digital compass. The result is a more distinct description of features in the camera image, which correspond to 3D points in the environment. This is particularly helpful in urban environments containing large amounts of repetitive visual features.
Additionally, we describe the first comprehensive test database for outdoor handheld camera localization comprising of over 45,000 real camera images of an urban environment, captured under natural camera motions and different illumination settings. For all these images, the dataset not only contains readings of the sensors attached to the camera, but also ground truth information on the full 6DoF camera pose, and the geometry and texture of the environment. Based on this dataset, which we have made available to the public, we show that using our proposed framework provides both faster matching and better localization results compared to state-of-the-art methods.
[Preprint (pdf)] [@ SCITEPRESS Digital Library]
Video
Copyright © 2008—2021 Daniel Kurz. All rights reserved.