Publications
ISMAR 2012 - Full paper
Representative Feature Descriptor Sets for Robust Handheld Camera Localization
Kurz, D., Olszamowski, T., and BenHimane S.
In Proc. IEEE and ACM International Symposium on Mixed and Augmented Reality (ISMAR2012), pp. 65-70, Atlanta, Georgia, USA, 2012.
Abstract
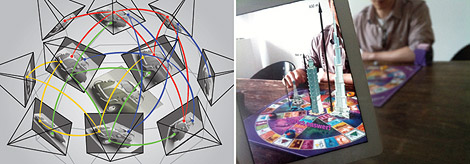
We present a method to automatically determine a set of feature descriptors that describes an object such that it can be localized under a variety of viewpoints. Based on a set of synthetically generated views, local image features are detected, described and aggregated in a database. Our proposed method evaluates matches between these database features to eventually find a set of the most representative descriptors from the database. Using this scalable offline process, the localization success rate is significantly increased without adding computational load to the runtime method.
Moreover, if camera localization is performed with respect to objects at a known gravity orientation, we propose to create multiple reference descriptor sets for different angles between the camera's principal axis and the gravity vector. This approach is particularly suited for handheld devices with built-in inertial sensors and enables matching against a reference dataset only containing the information relevant for camera poses that are consistent with the measured gravity.
Comprehensive evaluations of the proposed methods using a large quantity of real camera images, a variety of objects, different cameras and different kinds of feature descriptors confirm that our approaches outperform standard feature descriptor-based methods.
[BibTex (bib)] [Preprint (pdf)] [@ IEEE Digital Library]
Related publications

Kurz, D., and BenHimane S.
Handheld Augmented Reality involving gravity measurements
In Computers & Graphics, Special Section on Augmented Reality, pp. 866883, November 2012 (Volume 36, Issue 7).

Kurz, D., and BenHimane S.
Gravity-Aware Handheld Augmented Reality
In Proc. IEEE and ACM International Symposium on Mixed and Augmented Reality (ISMAR2011), pp. 111-120,
Basel, Switzerland, 2011. (Best Paper Award Nominee)
Copyright © 2008—2021 Daniel Kurz. All rights reserved.