Publications
CVPR 2011 - Full paper
Inertial sensor-aligned visual feature descriptors
Kurz, D., and BenHimane S.
In Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR2011), pp. 161-166, Colorado Springs, USA, 2011.
Abstract
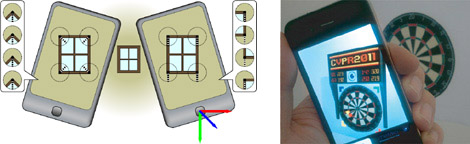
We propose to align the orientation of local feature descriptors with the gravitational force measured with inertial sensors. In contrast to standard approaches that gain a reproducible feature orientation from the intensities of neighboring pixels to remain invariant against rotation, this approach results in clearly distinguishable descriptors for congruent features in different orientations.
Gravity-aligned feature descriptors (GAFD) are suitable for any application relying on corresponding points in multiple images of static scenes and are particularly beneficial in the presence of differently oriented repetitive features as they are widespread in urban scenes and on man-made objects. In this paper, we show with different examples that the process of feature description and matching gets both faster and results in better matches when aligning the descriptors with the gravity compared to traditional techniques.
[BibTex (bib)] [Preprint (pdf)] [Poster (pdf)] [@ IEEE Digital Library]
Related publications

Kurz, D., and BenHimane S.
Handheld Augmented Reality involving gravity measurements
In Computers & Graphics, Special Section on Augmented Reality, pp. 866883, November 2012 (Volume 36, Issue 7).

Kurz, D., and BenHimane S.
Gravity-Aware Handheld Augmented Reality
In Proc. IEEE and ACM International Symposium on Mixed and Augmented Reality (ISMAR2011), pp. 111-120,
Basel, Switzerland, 2011. (Best Paper Award Nominee)
Copyright © 2008—2021 Daniel Kurz. All rights reserved.